When I set up to do my POP3 project, I ended up buying an Arduino Ethernet shield and an Adafruit Ethernet shield plus a Lantronix Xport. Having both, I figured it would be a good challenge to get both talking to each other and the result is this fairly simple project which actually ended up taking a lot of thought. It is loosely based on "Networked Game" project in Tom Igoe's indispensable book "Making Things Talk", but Tom's example does the much harder job of writing everything in the low-level serial commands to the Xport while I am lazy and used the published libraries! The challenge here is that the two network shields have two different Arduino libraries which really don't work quite the same way. Also, the Adafruit library is pretty light on explanation and the examples provided have no comments in the code!
Here is the basic setup of this project, basically the accelerometer on the "server" controls two servos on the "client":


The servos, of course, could be hooked up to any number of things like the X-Y axis of a camera mount or a motion base for a game of some kind. Conceptually, of course, through the magic of the Internet and with the right networking setup, the client could be in New York and the server in Instanbul. Also, through the miracle of standard IP protocols I can use one make of shield to successfully communicate with another using two totally different libraries!
Here is a quick video of the rig in action:
Note that the servos jitter slightly when they are hooked up because of slight variations of the analog readings on the accelerometer. I could probably do some averaging to smooth out the readings to eliminate that jitter.
The Server
The server is actually very simple. I used the Adafruit ADXL335 accelerometer (info) that is hooked up to the first three analog pins on the Arduino Diecimilia. The Arduino reads and sends out the X, Y and Z axis, but the client only uses the X and Y values because I only have two servos. It would be pretty easy to build support in for all three axes on the client. Apart from the accelerometer, the only other component is the LED that indicates connected or not connected.


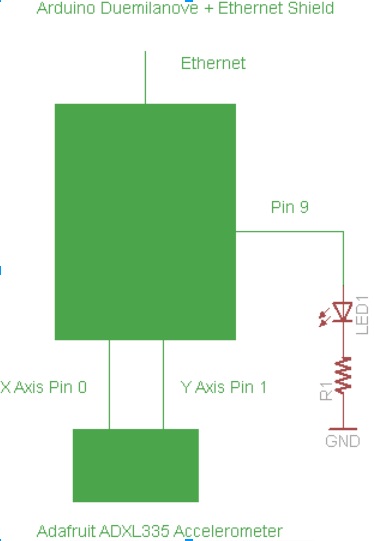
The code is equally simple. It reads the accelerometer and when it receives a "g" from the client it prints out the X, Y & Z readings. When it receives an "x" it ends the session. That's it! Note that this uses the Ethernet.h library distributed with the Arduino software.
* Simple Ethernet Server * * A simple server that shows the value of the analog input pins 0 - 2 * which are connected to an ADXL335 Accelerometer. by Chris Armour, Jan 2010 */ #includebyte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED }; //Setting the MAC address byte ip[] = { 192, 168, 0, 177 }; //IP address of the server int XPin = 0; int YPin = 1; int ZPin = 2; int ValX = 0; int ValY = 0; int ValZ = 0; int ledPin = 9; char c; Server server(54321); //This is the port the server listens on. //==============Setup pins, server & serial ===================// void setup() { Ethernet.begin(mac, ip); server.begin(); Serial.begin(9600); pinMode(ledPin, OUTPUT); digitalWrite(ledPin, LOW); } //=====================Main loop =============================// void loop() { digitalWrite(ledPin, LOW); //If there is no client connected the LED is off. Client client = server.available(); while (client.connected()) { if (client.available()) { digitalWrite(ledPin, HIGH); char c = client.read(); //Read one character at a time. Serial.print("Value received: "); Serial.println(c); if (c == 'g') { //"g means "get" ValX = analogRead(XPin); ValY = analogRead(YPin); ValZ = analogRead(ZPin); Serial.print("Value sent: "); Serial.print(ValX); Serial.print(","); Serial.print(ValY); Serial.print(","); Serial.println(ValZ); client.print(">"); client.print(ValX); client.print(","); client.print(ValY); client.print(","); client.println(ValZ); break; } if (c == 'x'){ //x means kill the session. digitalWrite(ledPin, LOW); //turn off the LED client.flush(); client.stop(); } } } delay(50); }
The Client
The client is a slightly more complex beast in that it has a switch to initiate a connection, an LED to indicate the connection state and the servos:

The code is also somewhat more involved. Part of that is because of using the AF_Xport library from Adafruit which takes a bit more fiddling, but also because the client needs the extra logic to initiate and disengage the connection. The main problem area is on resetting the Xport which doesn't always seem to want to connect on the first try so I had to build a loop in to retry the reset until it connects. This is a bit inelegant, but it looks like others have had this problem too.
/* A network client based on Adafruit Ethernet Shield using the Xport ethernet-to-serial adapter. It moves servos based on analog input from a server with an ADXL335 Accelerometer. by Chris Armour, Jan 2010 */ #include#include #include #define XPORT_RXPIN 2 #define XPORT_TXPIN 3 #define XPORT_RESETPIN 4 #define XPORT_DTRPIN 5 #define XPORT_CTSPIN 6 #define XPORT_RTSPIN 7 #define IPADDR "192.168.0.177" //IP Address of the Arduino Server #define PORT 54321 //IP port of the server AF_XPort xport = AF_XPort(XPORT_RXPIN, XPORT_TXPIN, XPORT_RESETPIN, XPORT_DTRPIN, XPORT_RTSPIN, XPORT_CTSPIN); uint8_t ret; //The return variable needs to be formated as a unsigned integer of length 8 bits int Xval = 0; int Yval = 0; int Xservo = 0; int Yservo = 0; int buttonPin = 11; int buttonWas = 0; int buttonIs = 1; int ledState = 0; //I believe these are actually flipped 0 = On 1 = off int ledPin = 13; boolean ConnectState = false; char linebuffer[16]; //Very small line buffer because we just need the X-Y readings. Servo Xservobj; Servo Yservobj; int loopCount = 0; //===============Setup pins, servo, xport ==========// void setup() { pinMode(buttonPin, INPUT); pinMode(ledPin, OUTPUT); Serial.begin(9600); xport.begin(9600); delay(300); Serial.println("Finished Setup..."); Xservobj.attach(9); Yservobj.attach(8); buttonIs = digitalRead(buttonPin); } //===============Functions===================// void getButton() { buttonWas = buttonIs; // Set the old state of the button to be the current state since we're creating a new current state. buttonIs = digitalRead(buttonPin); //Read the buttong state. } void errorBlink(){ //Flash 4 times for an error for (int x=0; x <=3; x++){ digitalWrite(ledPin, HIGH); delay(100); digitalWrite(ledPin,LOW); delay(100); } } char * resetXport(){ //Handles the regular reset of the Xport, returns reset errors ret = xport.reset(); switch (ret) { case ERROR_TIMEDOUT: { Serial.println("Timed out on reset!"); errorBlink(); return 0; } case ERROR_BADRESP: { Serial.println("Bad response on reset!"); errorBlink(); return 0; } case ERROR_NONE: { Serial.println("Reset OK!"); break; } default: Serial.println("Unknown error"); errorBlink(); return 0; } delay(250); } char * ConnectToggle(){ //This function turns the connection on or off if (ledState == 1){ //if the LED is off, then the client is not connected. resetXport(); //run the reset function ret = xport.connect(IPADDR, PORT); switch (ret) { //swtich case handles various error states case ERROR_TIMEDOUT: { Serial.println("Timed out on connect"); ConnectState = false; errorBlink(); return 0; } case ERROR_BADRESP: { Serial.println("Failed to connect"); ConnectState = false; loopCount++; Serial.print("Loop count ="); Serial.println(loopCount); ConnectToggle(); if (loopCount > 2){ //For reasons I have not been able to figure out, it usually takes two tries to connect errorBlink(); ConnectState = false; break; } } case ERROR_NONE: { Serial.println("Connected..."); ConnectState = true; Serial.println(ConnectState); digitalWrite(ledPin, HIGH); ledState = 0; loopCount = 0; break; } default: Serial.println("Unknown error"); ConnectState = false; errorBlink(); return 0; } } else { //Toggle off connection ledState = 1; digitalWrite(ledPin, LOW); //turn OFF the LED xport.println("x"); //Send the x command that kills the session. delay(100); xport.disconnect(); Serial.println("Disconnected."); ConnectState = false; } } void fetchStuff() { //Gets the linebuffer xport.flush(100); xport.println("g"); ret=xport.readline_timeout(linebuffer, 16, 200); // get first line while(ret!=0){ ret=xport.readline_timeout(linebuffer,16,200); } } void moveServos(){ //Note that the server sends out the X, Y & Z values, but Z is not used. It could be. Xval = (((linebuffer[1] - 48) * 100) + ((linebuffer[2] - 48) * 10) + (linebuffer[3] - 48)); //Extract X value & convert the ASCII to integers // Serial.print("Xval: "); // Serial.println(Xval, DEC); Xservo = map(Xval, 275, 425, 0, 180); //Map the range of X values from the server to the servos Serial.print("Xservo: "); Serial.println(Xservo, DEC); Xservobj.write(Xservo); delay(15); Yval = (((linebuffer[5] - 48) * 100) + ((linebuffer[6] - 48) * 10) + (linebuffer[7] - 48));//Extract Y value & convert the ASCII to integers // Serial.print("Yval: "); // Serial.println(Yval, DEC); Yservo = map(Yval, 275, 425, 0, 180); //Map the range of Y values from the server to the servos Serial.print("Yservo: "); Serial.println(Yservo, DEC); Yservobj.write(Yservo); delay(15); } //==============Main loop==================// void loop() { // run over and over again getButton(); //Run to check if button has been pressed. if((buttonIs == 1) && (buttonWas == 0)){ ConnectToggle(); //If there is a change in the button state, toggle the connection on or off. } if (ConnectState == true){ //If the client is connected, do some work!! fetchStuff(); moveServos(); } }
Further work
The system needs a way to detect dropped connections - possibly using "millis()" to determine if a response or query has taken too long. As well, I really should smooth out those analog readings so the servos don't jitter! As well, I might just build a motion ase of some sort to hook up to the servos so they can do something slightly more cool that just flap their arms.
So, that's my first Arduino project in a few months! Thanks for the comments and questions. The site has apparently had over 11,000 hits, which completely amazes me. Please keep the comments and suggestions coming. I think next up will be another Chinese knock-off phone review.



